
移動ロボットの開発
KESでは、研究テーマとして移動ロボットについて取り組んでいます。
県内の大学、電気メーカ、建機メーカと連携し、人の脚を検出して追従する台車、AGV(自動搬送装置)を開発しました。
【役割分担】
建機メーカ:ニーズの提供
電気メーカ:台車の設計、製造
県内大学:脚追従機能の開発
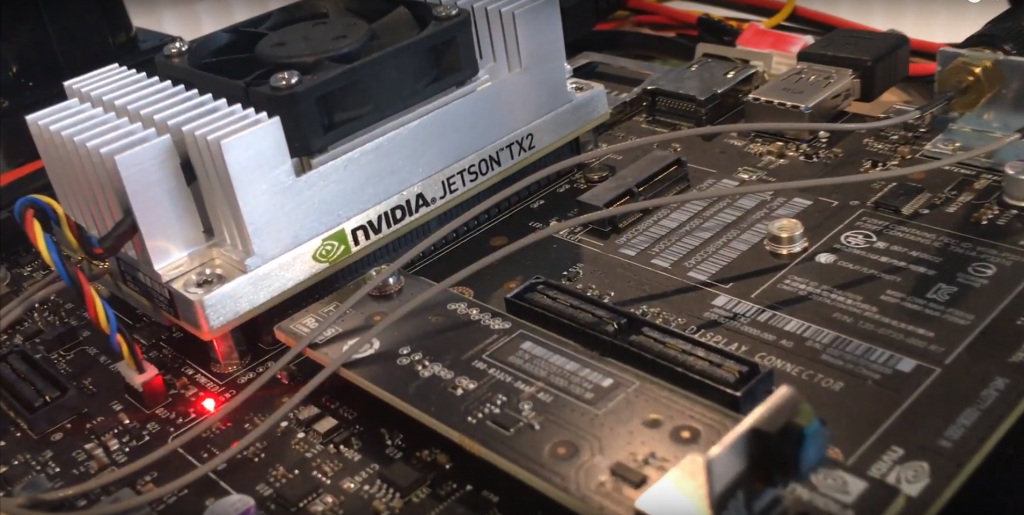
当社:インテグレーション(GPU選定、弱電回路設計、ソフトウェア設計)
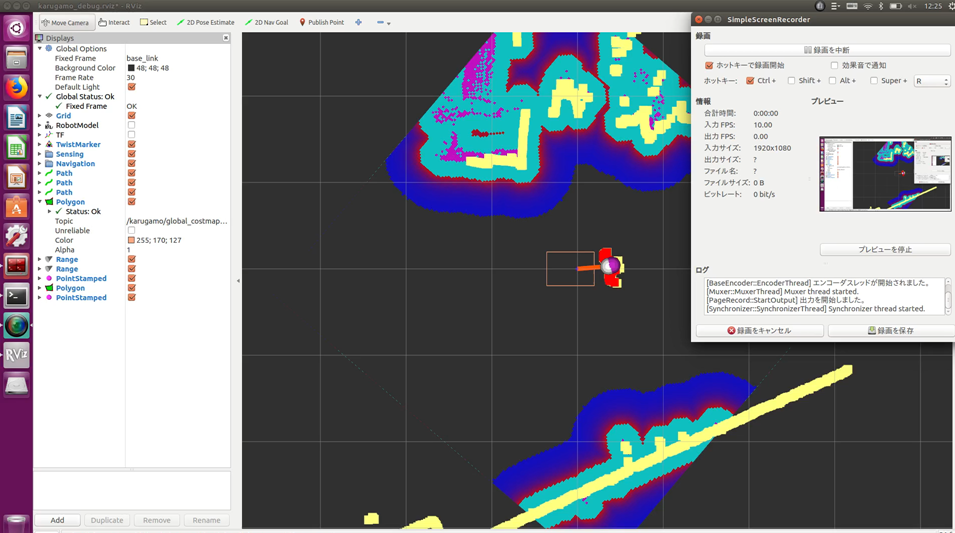
Linux、ROSをベースにソフトウェアを開発し、県内大学が開発した脚追従機能にROSのSLAM、センサー(LiDar、近接センサー、衝突センサー)を組み合わせて開発しました
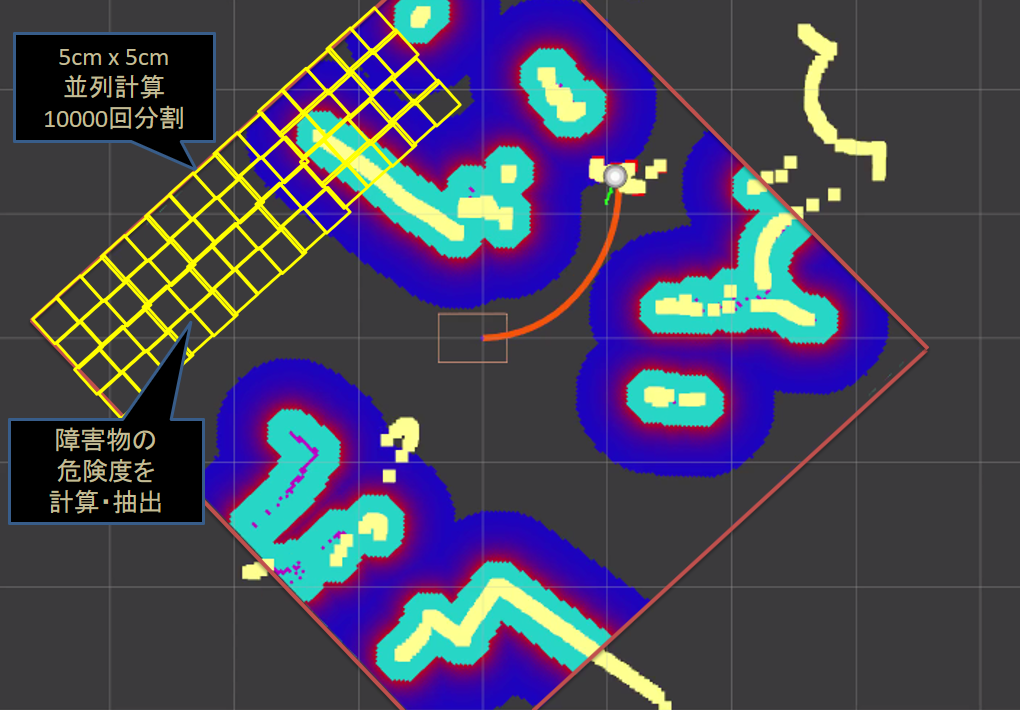
ROSはオープンソースとして公開されていますが、GPUを活用した構造になっていません。5m角の衝突回避エリアを5㎝角に分割し並列処理を行うことで高速処理を実現しております。
基本のプラットフォームはドローンにも・・・

基本のプラットフォームはドローンにも応用が利きます。 ドローンの研究開発実績としてJAXA(宇宙航空研究開発機構)の開発支援を行っています。
ROSを活用したAGV、ドローン、モビリティ、またこれらのフルカスタマイズについてはお問合せください。
業務に関するご相談・資料請求・技術者に関する
ご質問等随時受付しております。